|
CORC Project
CANOpen Robot Controller Software Documentation
|
|
CORC Project
CANOpen Robot Controller Software Documentation
|
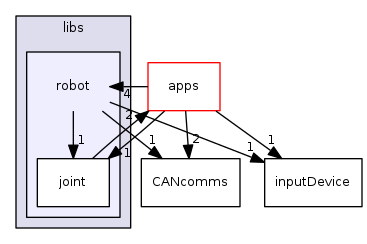
Directories | |
| directory | joint |
Files | |
| file | Drive.cpp [code] |
| file | Drive.h [code] |
The Drive class is used to interface with a CANOpen motor drive. According to the CiA402 standard. | |
| file | Robot.cpp [code] |
| Generic Abstract Robot class, which includes joints and a trajectory generator, to be used with a CAN-based robot device. | |
| file | Robot.h [code] |
The Robot class is a abstract class which is a software representation of a Robot with a flexible representation in terms of number of joints, number of sensors and type of I/O the real world or virtual robot has. The class specificall represents a robot with an underlying bus network connecting components to a master node, being the robots computer or processor. Implementations have been designed ExoRobot | |
| file | TrajectoryGenerator.cpp [code] |
| Base class of Trajectory Generator. Will always be extended with specific implementations. | |
| file | TrajectoryGenerator.h [code] |
| Base class of Trajectory Generator. Will always be extended with specific implementations, and is relatively scarce, given the differences expected in the different trajectories. | |
 1.8.11
1.8.11

