|
CORC Project
CANOpen Robot Controller Software Documentation
|
|
CORC Project
CANOpen Robot Controller Software Documentation
|
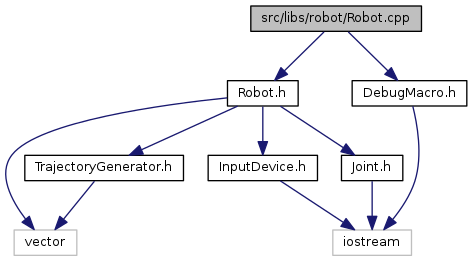
Generic Abstract Robot class, which includes joints and a trajectory generator, to be used with a CAN-based robot device. More...
Go to the source code of this file.
 1.8.11
1.8.11

