|
CORC Project
CANOpen Robot Controller Software Documentation
|
|
CORC Project
CANOpen Robot Controller Software Documentation
|
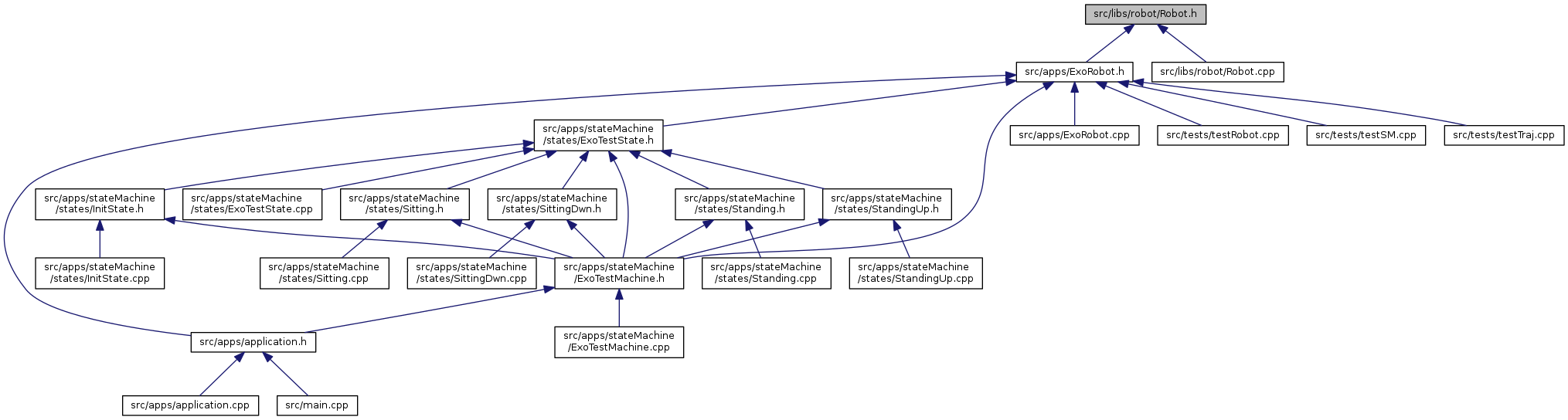
The Robot class is a abstract class which is a software representation of a Robot with a flexible representation in terms of number of joints, number of sensors and type of I/O the real world or virtual robot has. The class specificall represents a robot with an underlying bus network connecting components to a master node, being the robots computer or processor. Implementations have been designed ExoRobot
More... under CANOpen protocol, however others may be implemented by future developers.
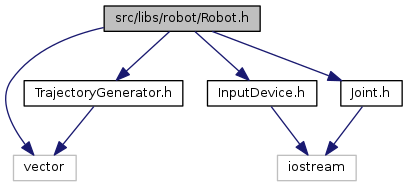
Go to the source code of this file.
Classes | |
| class | Robot |
| Abstract Class representing a robot. Includes vectors of Joint and InputDevice. More... | |
The Robot class is a abstract class which is a software representation of a Robot with a flexible representation in terms of number of joints, number of sensors and type of I/O the real world or virtual robot has. The class specificall represents a robot with an underlying bus network connecting components to a master node, being the robots computer or processor. Implementations have been designed ExoRobot under CANOpen protocol, however others may be implemented by future developers.
Definition in file Robot.h.
 1.8.11
1.8.11

