|
CORC Project
CANOpen Robot Controller Software Documentation
|
|
CORC Project
CANOpen Robot Controller Software Documentation
|
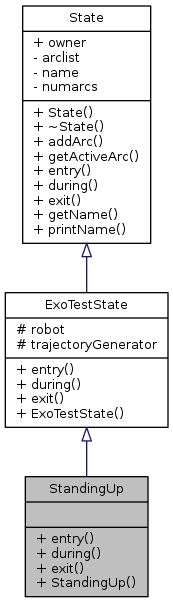
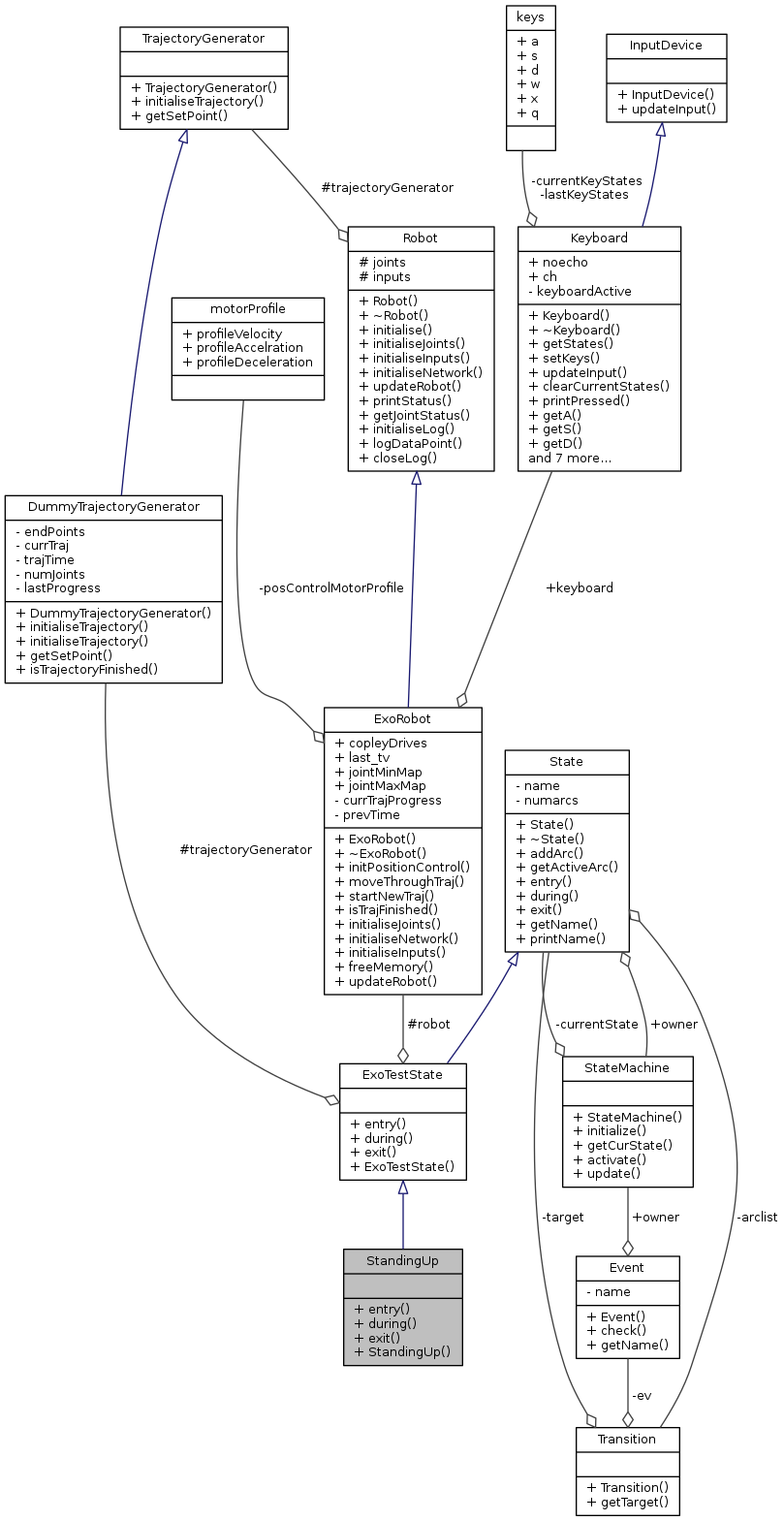
State for the ExoTestMachine (implementing ExoTestState) - representing when the exo is standing up (moving) More...
#include <StandingUp.h>
Public Member Functions | |
| void | entry (void) |
| Prepare Robot and Trajectory Generator objects to tigger a stand motion loads STAND paramaters into the Trajectory Generator object and runs robot startNewTrajectory function. More... | |
| void | during (void) |
| run the robot objects moveThroughtrajecoty function using the loaded trajectory dictated by the state machines Trajectory Generator object. More... | |
| void | exit (void) |
| Called once when the state exits. Pure virtual function, must be overwritten by each state. More... | |
| StandingUp (StateMachine *m, ExoRobot *exo, DummyTrajectoryGenerator *tg, const char *name=NULL) | |
 Public Member Functions inherited from ExoTestState Public Member Functions inherited from ExoTestState | |
| ExoTestState (StateMachine *m, ExoRobot *exo, DummyTrajectoryGenerator *tg, const char *name=NULL) | |
| Public Member Functions inherited from State | |
| State (StateMachine *p, const char n[]=NULL) | |
| Construct a new State object. More... | |
| ~State () | |
| bool | addArc (Transition *t) |
| Transition * | getActiveArc (void) |
| const char * | getName (void) |
| Returns the name of the state - Note that this. More... | |
| void | printName (void) |
| Prints the name of the state. More... | |
Additional Inherited Members | |
| Public Attributes inherited from State | |
| StateMachine * | owner |
| Pointer to the owning state machine. More... | |
| Protected Attributes inherited from ExoTestState | |
| ExoRobot * | robot |
| DummyTrajectoryGenerator * | trajectoryGenerator |
State for the ExoTestMachine (implementing ExoTestState) - representing when the exo is standing up (moving)
/file StandingUp.h /author Justin Fong /version 0.1 /date 2020-05-07
Definition at line 21 of file StandingUp.h.
| StandingUp::StandingUp | ( | StateMachine * | m, |
| ExoRobot * | exo, | ||
| DummyTrajectoryGenerator * | tg, | ||
| const char * | name = NULL |
||
| ) |
Definition at line 36 of file StandingUp.h.
|
virtual |
run the robot objects moveThroughtrajecoty function using the loaded trajectory dictated by the state machines Trajectory Generator object.
Implements ExoTestState.
Definition at line 12 of file StandingUp.cpp.
|
virtual |
Prepare Robot and Trajectory Generator objects to tigger a stand motion loads STAND paramaters into the Trajectory Generator object and runs robot startNewTrajectory function.
Implements ExoTestState.
Definition at line 4 of file StandingUp.cpp.
|
virtual |
Called once when the state exits. Pure virtual function, must be overwritten by each state.
Implements ExoTestState.
Definition at line 16 of file StandingUp.cpp.
 1.8.11
1.8.11

