|
CORC Project
CANOpen Robot Controller Software Documentation
|
|
CORC Project
CANOpen Robot Controller Software Documentation
|
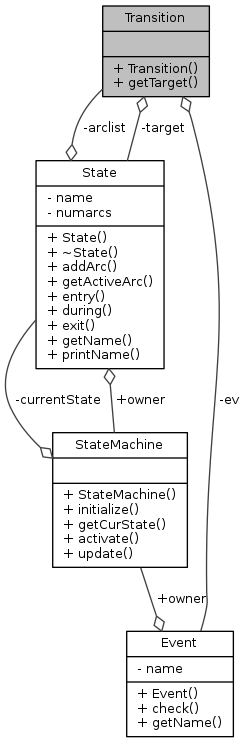
Represents possible transitions linking two State objects with an Event. More...
#include <Transition.h>
Public Member Functions | |
| Transition (State *targ, Event *e) | |
| State * | getTarget (void) |
Private Attributes | |
| Event * | ev |
| State * | target |
Friends | |
| class | State |
| class | StateMachine |
Represents possible transitions linking two State objects with an Event.
Definition at line 27 of file Transition.h.
Definition at line 33 of file Transition.h.
| State * Transition::getTarget | ( | void | ) |
Definition at line 8 of file Transition.cpp.
|
friend |
Definition at line 28 of file Transition.h.
|
friend |
Definition at line 29 of file Transition.h.
|
private |
Definition at line 40 of file Transition.h.
|
private |
Definition at line 41 of file Transition.h.
 1.8.11
1.8.11

