|
CORC Project
CANOpen Robot Controller Software Documentation
|
|
CORC Project
CANOpen Robot Controller Software Documentation
|
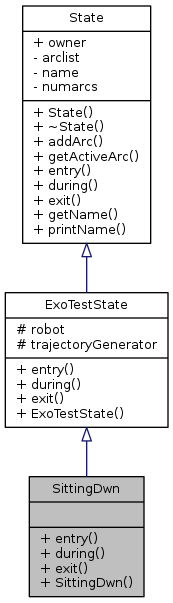
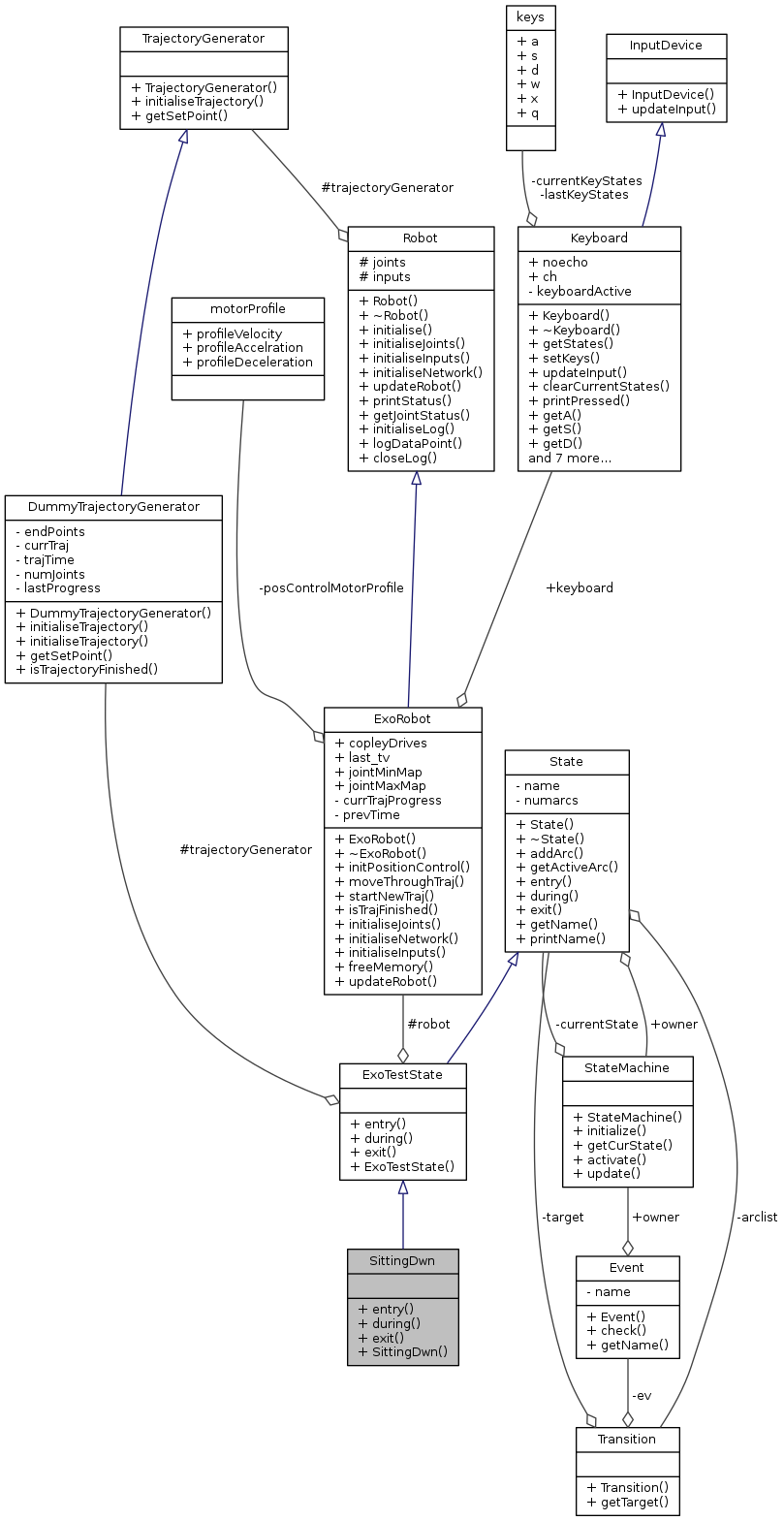
State for the ExoTestMachine (implementing ExoTestState) - representing when the exo is sitting down (moving) More...
#include <SittingDwn.h>
Public Member Functions | |
| void | entry (void) |
| Prepare Robot and Trajectory Generator objects to tigger a sit motion loads SIT paramaters into the Trajectory Generator object and runs robot startNewTrajectory function. More... | |
| void | during (void) |
| run the robot objectsmoveThroughtrajecoty function using the loaded trajectory dictated by the state machines Trajectory Generator object. More... | |
| void | exit (void) |
| Called once when the state exits. Pure virtual function, must be overwritten by each state. More... | |
| SittingDwn (StateMachine *m, ExoRobot *exo, DummyTrajectoryGenerator *tg, const char *name=NULL) | |
 Public Member Functions inherited from ExoTestState Public Member Functions inherited from ExoTestState | |
| ExoTestState (StateMachine *m, ExoRobot *exo, DummyTrajectoryGenerator *tg, const char *name=NULL) | |
| Public Member Functions inherited from State | |
| State (StateMachine *p, const char n[]=NULL) | |
| Construct a new State object. More... | |
| ~State () | |
| bool | addArc (Transition *t) |
| Transition * | getActiveArc (void) |
| const char * | getName (void) |
| Returns the name of the state - Note that this. More... | |
| void | printName (void) |
| Prints the name of the state. More... | |
Additional Inherited Members | |
| Public Attributes inherited from State | |
| StateMachine * | owner |
| Pointer to the owning state machine. More... | |
| Protected Attributes inherited from ExoTestState | |
| ExoRobot * | robot |
| DummyTrajectoryGenerator * | trajectoryGenerator |
State for the ExoTestMachine (implementing ExoTestState) - representing when the exo is sitting down (moving)
Starts the Sitting Down trajectory on entry, executes in during, and exits when trajectory is complete
Definition at line 20 of file SittingDwn.h.
| SittingDwn::SittingDwn | ( | StateMachine * | m, |
| ExoRobot * | exo, | ||
| DummyTrajectoryGenerator * | tg, | ||
| const char * | name = NULL |
||
| ) |
Definition at line 35 of file SittingDwn.h.
|
virtual |
run the robot objectsmoveThroughtrajecoty function using the loaded trajectory dictated by the state machines Trajectory Generator object.
Implements ExoTestState.
Definition at line 13 of file SittingDwn.cpp.
|
virtual |
Prepare Robot and Trajectory Generator objects to tigger a sit motion loads SIT paramaters into the Trajectory Generator object and runs robot startNewTrajectory function.
Implements ExoTestState.
Definition at line 5 of file SittingDwn.cpp.
|
virtual |
Called once when the state exits. Pure virtual function, must be overwritten by each state.
Implements ExoTestState.
Definition at line 16 of file SittingDwn.cpp.
 1.8.11
1.8.11

