|
CORC Project
CANOpen Robot Controller Software Documentation
|
|
CORC Project
CANOpen Robot Controller Software Documentation
|
#include <sys/time.h>#include <array>#include <cmath>#include <fstream>#include <iostream>#include <string>#include "ExoRobot.h"#include "ExoTestState.h"#include "StateMachine.h"#include "InitState.h"#include "Sitting.h"#include "SittingDwn.h"#include "Standing.h"#include "StandingUp.h"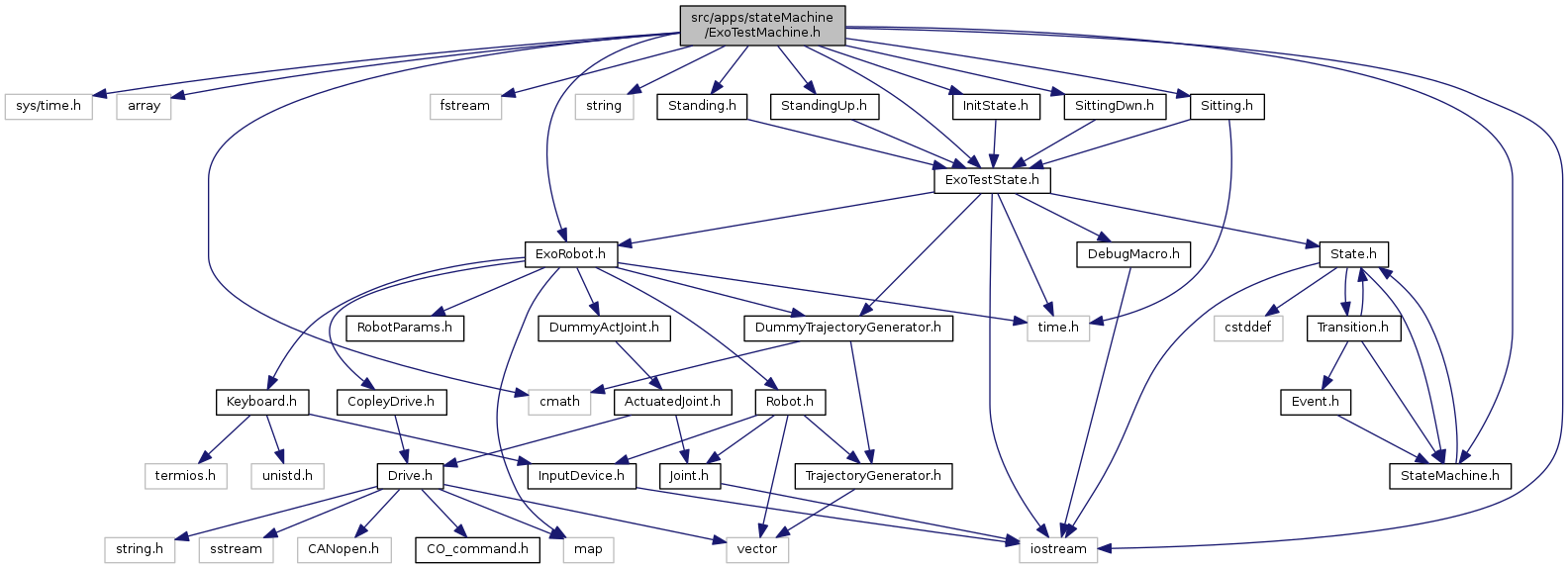
Go to the source code of this file.
Classes | |
| class | ExoTestMachine |
| Example implementation of a StateMachine for the ExoRobot class. States should implemented ExoTestState. More... | |
The Keyboard class is an implementation of the abstract <class>Input</class>class for a computer keyboard. The device has key states which maintain the current values for a given programs update frame or refresh rate.
Version 0.1 Date: 07/04/2020
/brief The ExoTestMachine class represents an example implementation of an exoskeleton state machine with five states. Initialisation, sitting, standing, standing up and sitting down. The test machine is made as example for developers to structure their specific use cases with. For more detail on the architecture and mechanics of the state machine class see:https://embeded.readthedocs.io/en/latest/StaeMachines/.
State transition Diagram.
startExo startStand
initState +--—> sitting +------—> standingUp ^ + EndTraj | | EndTraj | |
Version 0.1 Date: 07/04/2020
Definition in file ExoTestMachine.h.
 1.8.11
1.8.11

