|
CORC Project
CANOpen Robot Controller Software Documentation
|
|
CORC Project
CANOpen Robot Controller Software Documentation
|
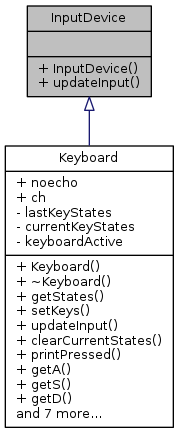
Abstract class representing any input device to be used in a Robot object. More...
#include <InputDevice.h>
Public Member Functions | |
| InputDevice () | |
| virtual void | updateInput ()=0 |
| pure virtual method to be implemented by specific input devices and used by the virtual robot object to update the current state of the robotic systems input device. More... | |
Abstract class representing any input device to be used in a Robot object.
Definition at line 23 of file InputDevice.h.
| InputDevice::InputDevice | ( | ) |
Definition at line 4 of file InputDevice.cpp.
|
pure virtual |
pure virtual method to be implemented by specific input devices and used by the virtual robot object to update the current state of the robotic systems input device.
Implemented in Keyboard.
 1.8.11
1.8.11

