|
CORC Project
CANOpen Robot Controller Software Documentation
|
|
CORC Project
CANOpen Robot Controller Software Documentation
|
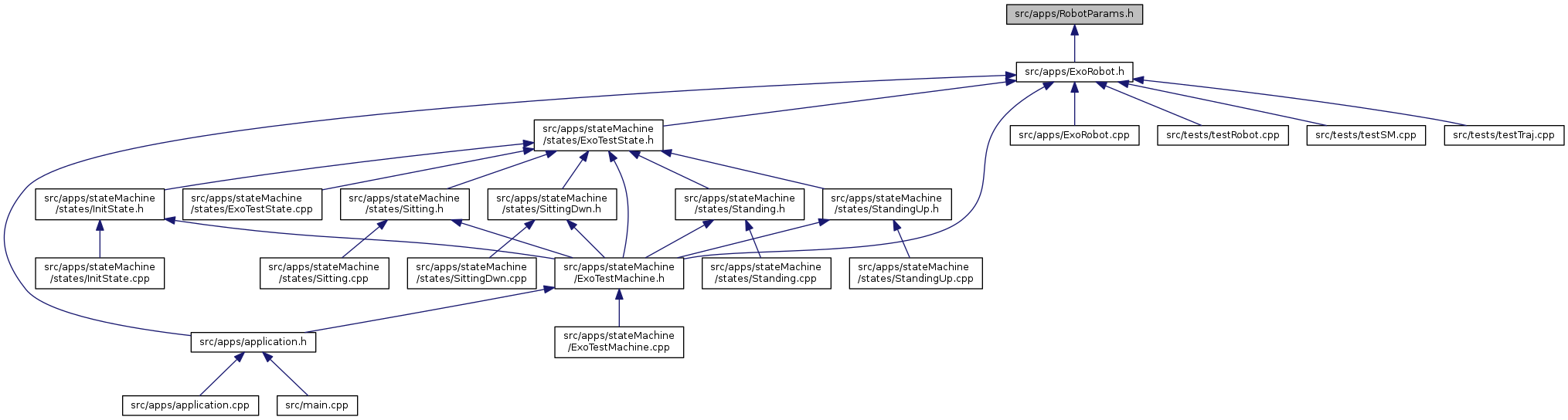
Specific paramaters and naming definitions for exoskeleton robot class implementetion. More...
Go to the source code of this file.
Macros | |
| #define | NUM_JOINTS 6 |
| #define | deg2rad(deg) ((deg)*M_PI / 180.0) |
| #define | rad2deg(rad) ((rad)*180.0 / M_PI) |
| #define | KNEE_MOTOR_POS1 (250880) |
| #define | KNEE_MOTOR_DEG1 (90) |
| #define | KNEE_MOTOR_POS2 (0) |
| #define | KNEE_MOTOR_DEG2 (0) |
| #define | HIP_MOTOR_POS1 (250880) |
| #define | HIP_MOTOR_DEG1 (90) |
| #define | HIP_MOTOR_POS2 (0) |
| #define | HIP_MOTOR_DEG2 (180) |
| #define | ANKLE_MOTOR_POS1 (0) |
| #define | ANKLE_MOTOR_DEG1 (90) |
| #define | ANKLE_MOTOR_POS2 (-800000) |
| #define | ANKLE_MOTOR_DEG2 (115) |
Enumerations | |
| enum | robotJoints { LEFT_HIP = 0, LEFT_KNEE = 1, RIGHT_HIP = 2, RIGHT_KNEE = 3, LEFT_ANKLE = 4, RIGHT_ANKLE = 5 } |
| enum | RobotMode { RobotMode::NORMALWALK, RobotMode::SITDWN, RobotMode::STNDUP, RobotMode::UPSTAIR, RobotMode::DWNSTAIR, RobotMode::TILTUP, RobotMode::TILTDWN, RobotMode::BKSTEP, RobotMode::FTTG, RobotMode::UNEVEN, RobotMode::INITIAL } |
Specific paramaters and naming definitions for exoskeleton robot class implementetion.
Definition in file RobotParams.h.
| #define ANKLE_MOTOR_DEG1 (90) |
Definition at line 74 of file RobotParams.h.
| #define ANKLE_MOTOR_DEG2 (115) |
Definition at line 76 of file RobotParams.h.
| #define ANKLE_MOTOR_POS1 (0) |
Paramater definitions: Ankle motor reading and corresponding angle. Used for mapping between degree and motor values.
Definition at line 73 of file RobotParams.h.
| #define ANKLE_MOTOR_POS2 (-800000) |
Definition at line 75 of file RobotParams.h.
| #define deg2rad | ( | deg | ) | ((deg)*M_PI / 180.0) |
Definition at line 21 of file RobotParams.h.
| #define HIP_MOTOR_DEG1 (90) |
Definition at line 66 of file RobotParams.h.
| #define HIP_MOTOR_DEG2 (180) |
Definition at line 68 of file RobotParams.h.
| #define HIP_MOTOR_POS1 (250880) |
Paramater definitions: Hip motor reading and corresponding angle. Used for mapping between degree and motor values.
Definition at line 65 of file RobotParams.h.
| #define HIP_MOTOR_POS2 (0) |
Definition at line 67 of file RobotParams.h.
| #define KNEE_MOTOR_DEG1 (90) |
Definition at line 58 of file RobotParams.h.
| #define KNEE_MOTOR_DEG2 (0) |
Definition at line 60 of file RobotParams.h.
| #define KNEE_MOTOR_POS1 (250880) |
Paramater definitions: Knee motor reading and corresponding angle. Used for mapping between degree and motor values.
Definition at line 57 of file RobotParams.h.
| #define KNEE_MOTOR_POS2 (0) |
Definition at line 59 of file RobotParams.h.
| #define NUM_JOINTS 6 |
Definition at line 16 of file RobotParams.h.
| #define rad2deg | ( | rad | ) | ((rad)*180.0 / M_PI) |
Definition at line 22 of file RobotParams.h.
| enum robotJoints |
An enum type. Joint Index for the 6 joints (note, NODEID = this + 1)
| Enumerator | |
|---|---|
| LEFT_HIP |
Left Hip |
| LEFT_KNEE |
Left Knee |
| RIGHT_HIP |
Right Hip |
| RIGHT_KNEE |
Right Knee |
| LEFT_ANKLE |
Left Ankle |
| RIGHT_ANKLE |
Right Knee |
Definition at line 28 of file RobotParams.h.
|
strong |
An enum class. Different Robot motion profiles
| Enumerator | |
|---|---|
| NORMALWALK | |
| SITDWN | |
| STNDUP | |
| UPSTAIR | |
| DWNSTAIR | |
| TILTUP | |
| TILTDWN | |
| BKSTEP | |
| FTTG | |
| UNEVEN | |
| INITIAL | |
Definition at line 40 of file RobotParams.h.
 1.8.11
1.8.11

