|
CORC Project
CANOpen Robot Controller Software Documentation
|
|
CORC Project
CANOpen Robot Controller Software Documentation
|
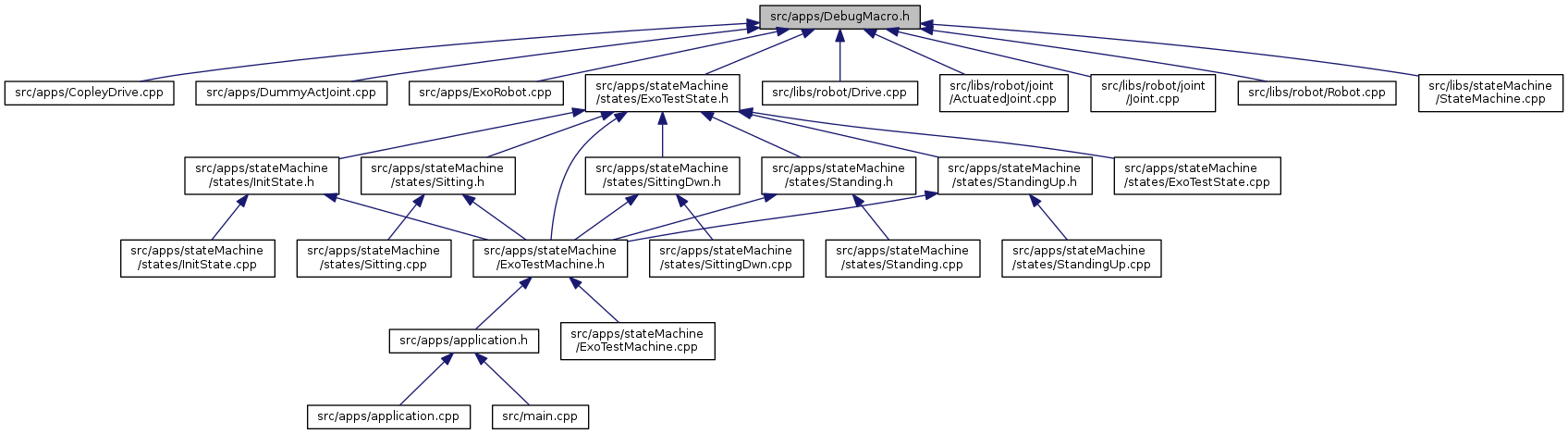
Defines some macros for debugging output. More...
#include <iostream>
Go to the source code of this file.
Macros | |
| #define | NOROBOT |
| #define | DEBUG |
| #define | DEBUG_OUT(x) (std::cout << x << std::endl); |
Defines some macros for debugging output.
Definition in file DebugMacro.h.
| #define DEBUG |
Definition at line 17 of file DebugMacro.h.
| #define DEBUG_OUT | ( | x | ) | (std::cout << x << std::endl); |
Definition at line 19 of file DebugMacro.h.
| #define NOROBOT |
Definition at line 16 of file DebugMacro.h.
 1.8.11
1.8.11

